今回はHALの圧力容器についての話です。
アクリル材の半球、円筒、円盤、ドーナツ状の円盤の貼り合わせ・組み合わせで水深約10mまでの耐圧性能を持った圧力容器を作ることができます。
直径150mm、厚み3mmのアクリル半球と直径150mm、厚み4mmの円筒をアクリル用癒着接着剤で貼り合わせて前方圧力容器を作ります。
直径150mm、厚み3mmの円盤と直径150mm、厚み4mmの円筒を貼り合わせて後方の圧力容器を作ります。
それに蓋をつけると出来上がりなのですが、この蓋にはひと工夫が必要です。普通蓋には溝を掘ってOリングを用いて水密を保ちますが、この溝をHALでは径の違うドーナツ状円盤の貼り合わせせで実現しました。

図1:蓋の貼り付け
142mm内径に合うOリング規定の溝幅7.5mmのところを8mmで作りましたが問題なく水密効果が得られました。
鏡板φ150mm/t3、ドーナツ大φ141mm/t5、ドーナツ小φ132mm/t8、ドーナツ大φ141mm/t5をこの順に貼り付けて蓋を作りました。
このとき中心を丁寧に合わせることに注意してください。
容器に蓋を付けただけでは外にケーブルが出せません。
水中コネクタであるバルクヘッドコネクタは高価であり、コスト削減のためIP68(防水1気圧規格)のLAPP社製スキントップを用いてケーブルを直接外に出しました。
スキントップを通す穴径は通るギリギリの大きさが推奨です。

図2:前方hull
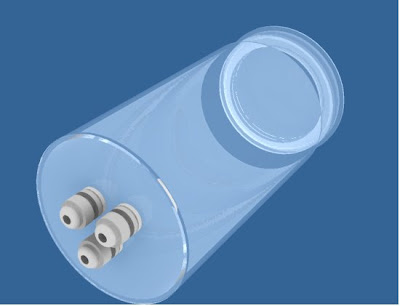
図3:後方hull
使用したスキントップはST-7、ST-M16などです。使うケーブルの数や太さに合わせて選びます。http://www.kmecs.com/products/products.cgi?id=17
前方は蓋に12個の穴をあけ、後方は鏡板に3個の穴をあけましたが、どちらも問題なく耐圧効果は得られています。
耐圧計算は浦環・高川真一編著「海中ロボット総覧」のpp.151~の式を参考に計算し、水深10m耐圧を目標に設計しました。
前方の蓋はフレームと容器で挟んで固定し、後方の蓋はバンドで留めました。

図4:空っぽのHALurabo
蓋を取り付ける際、グリスを塗っておくと楽に閉めることができます。


0 件のコメント:
コメントを投稿